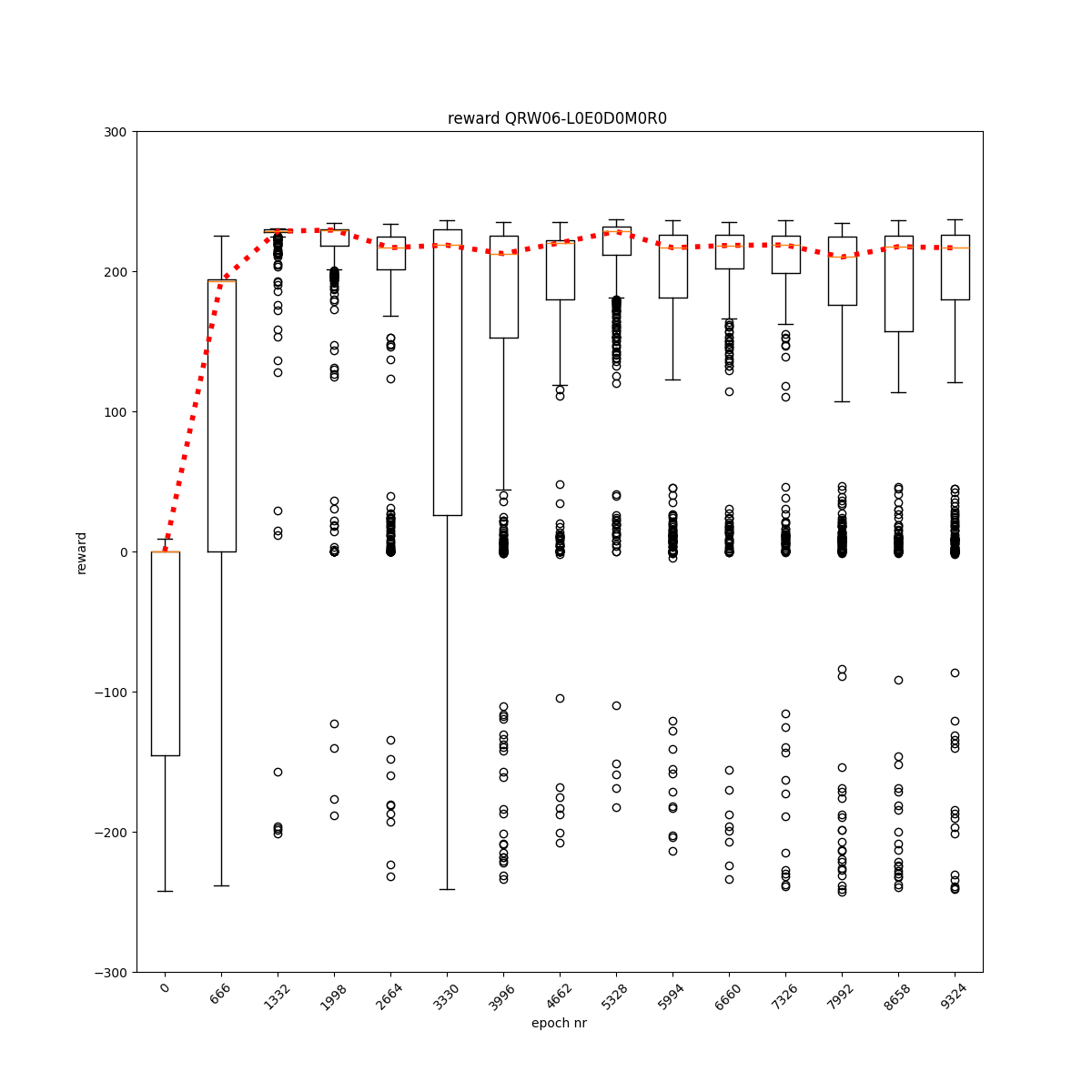
L0 E0 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
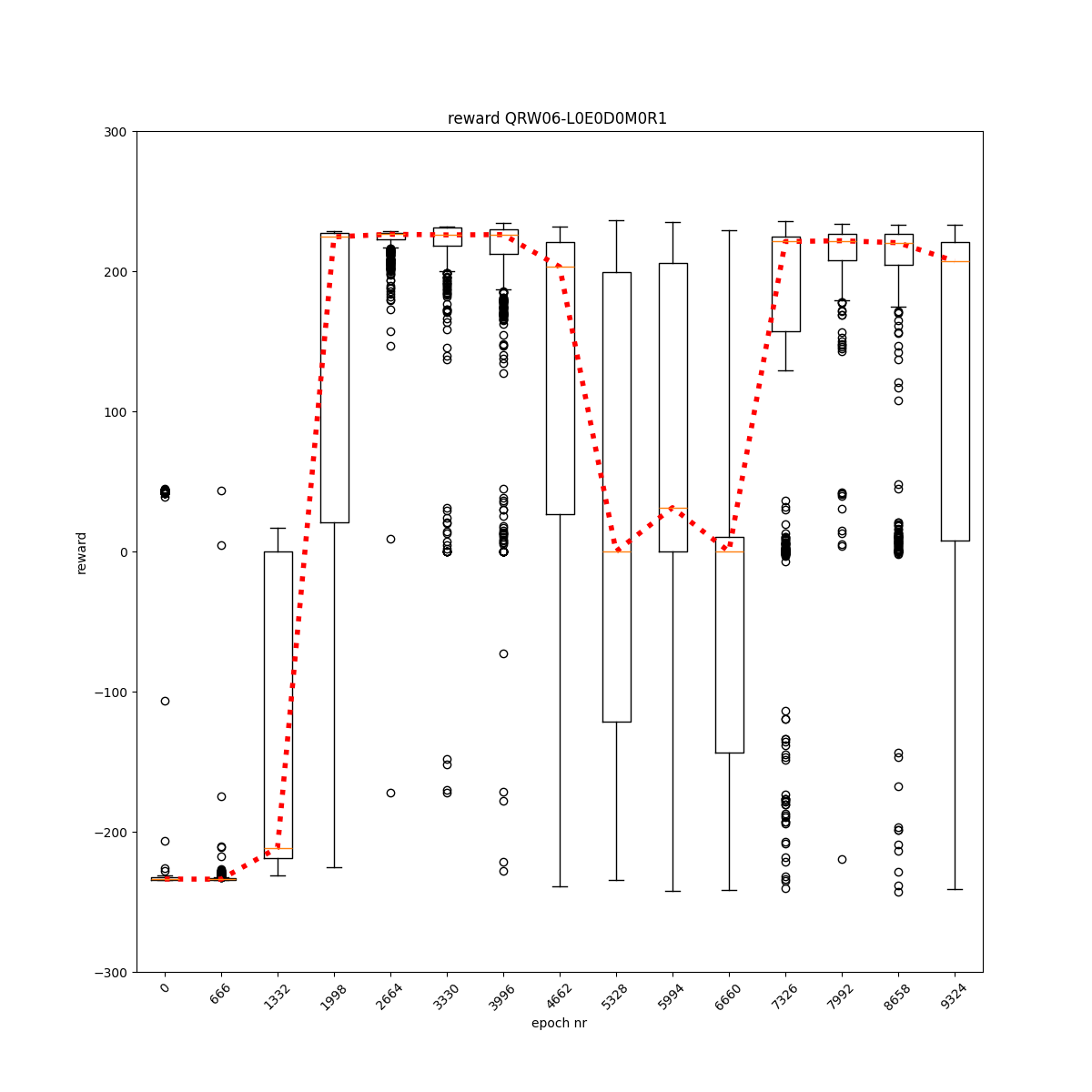
L0 E0 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
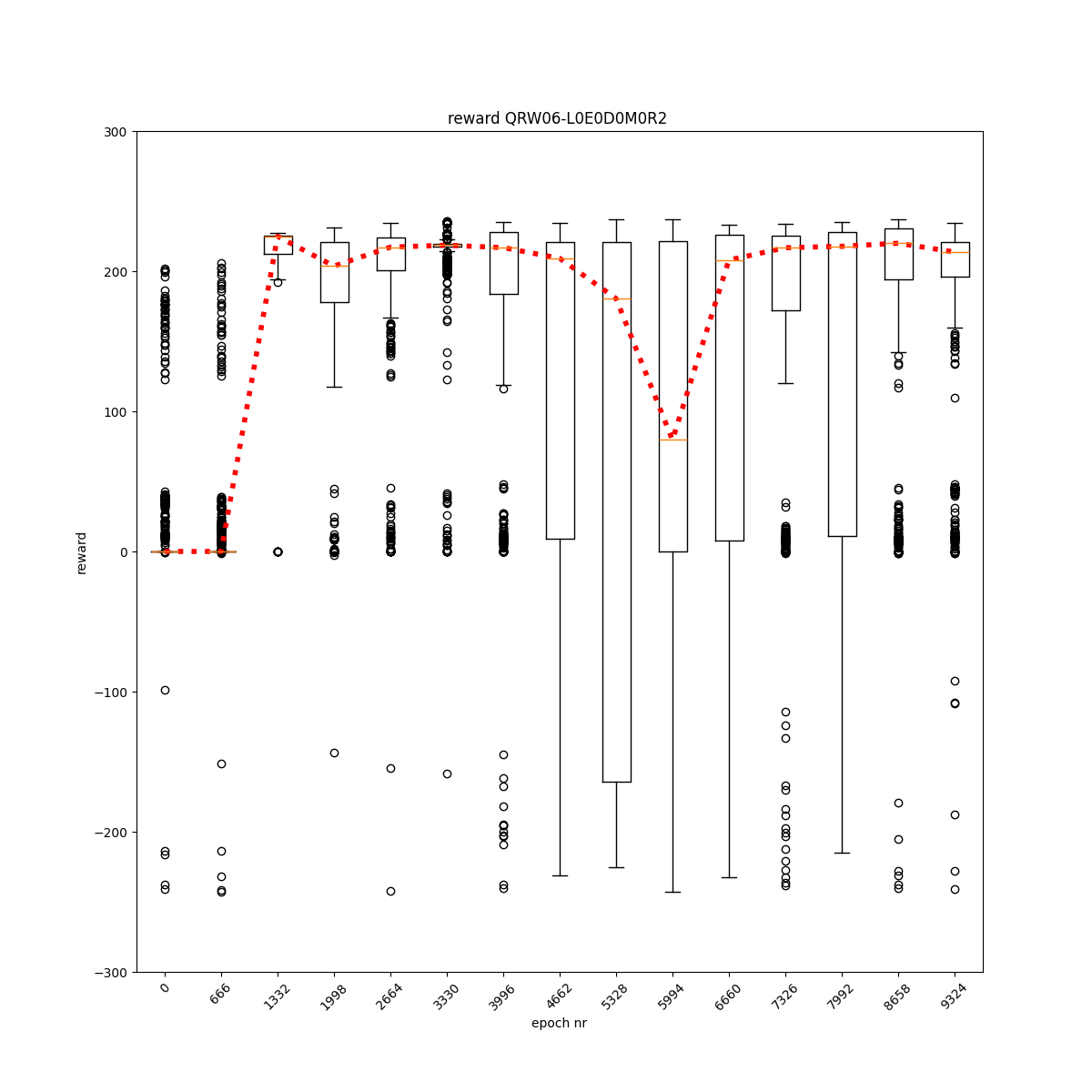
L0 E0 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
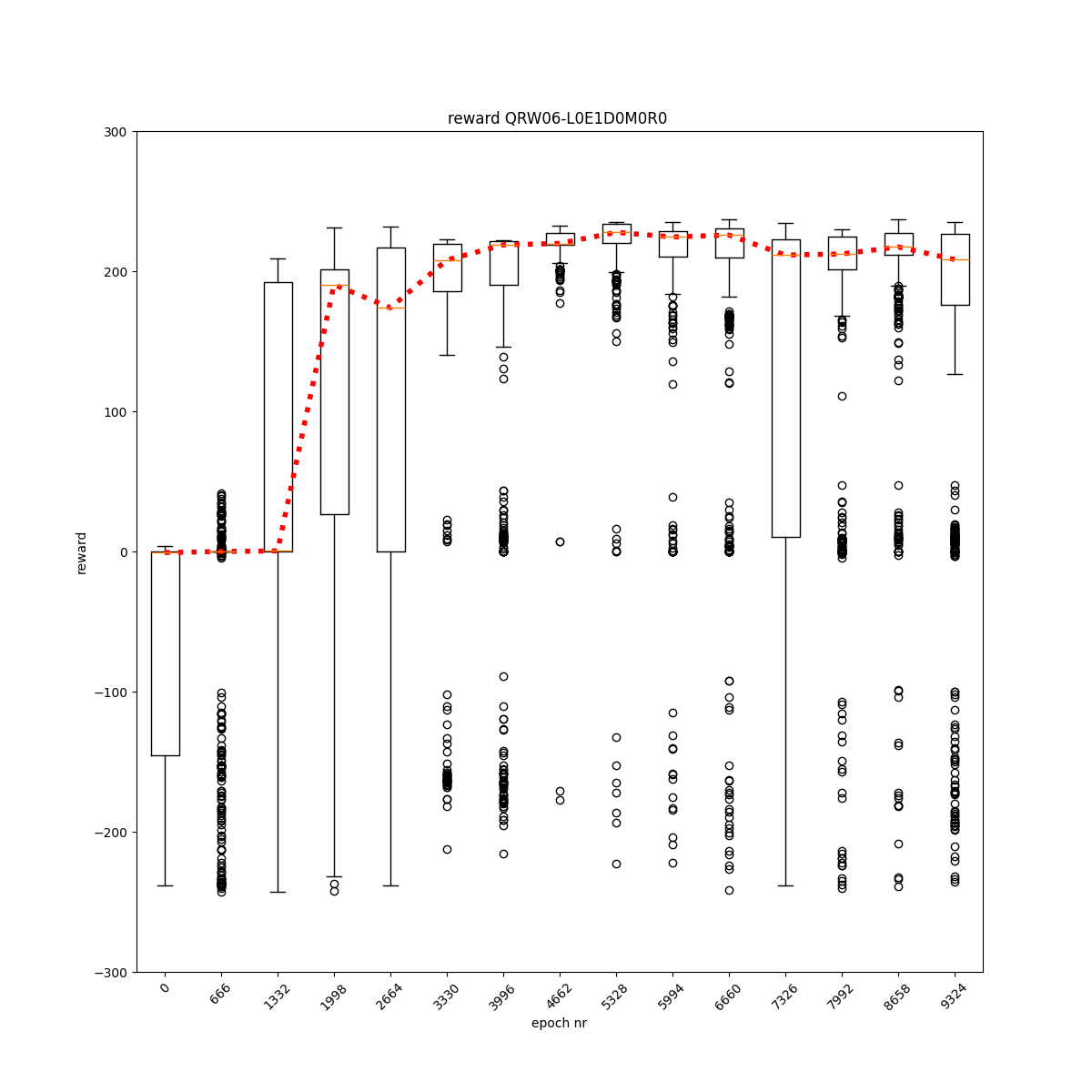
L0 E1 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
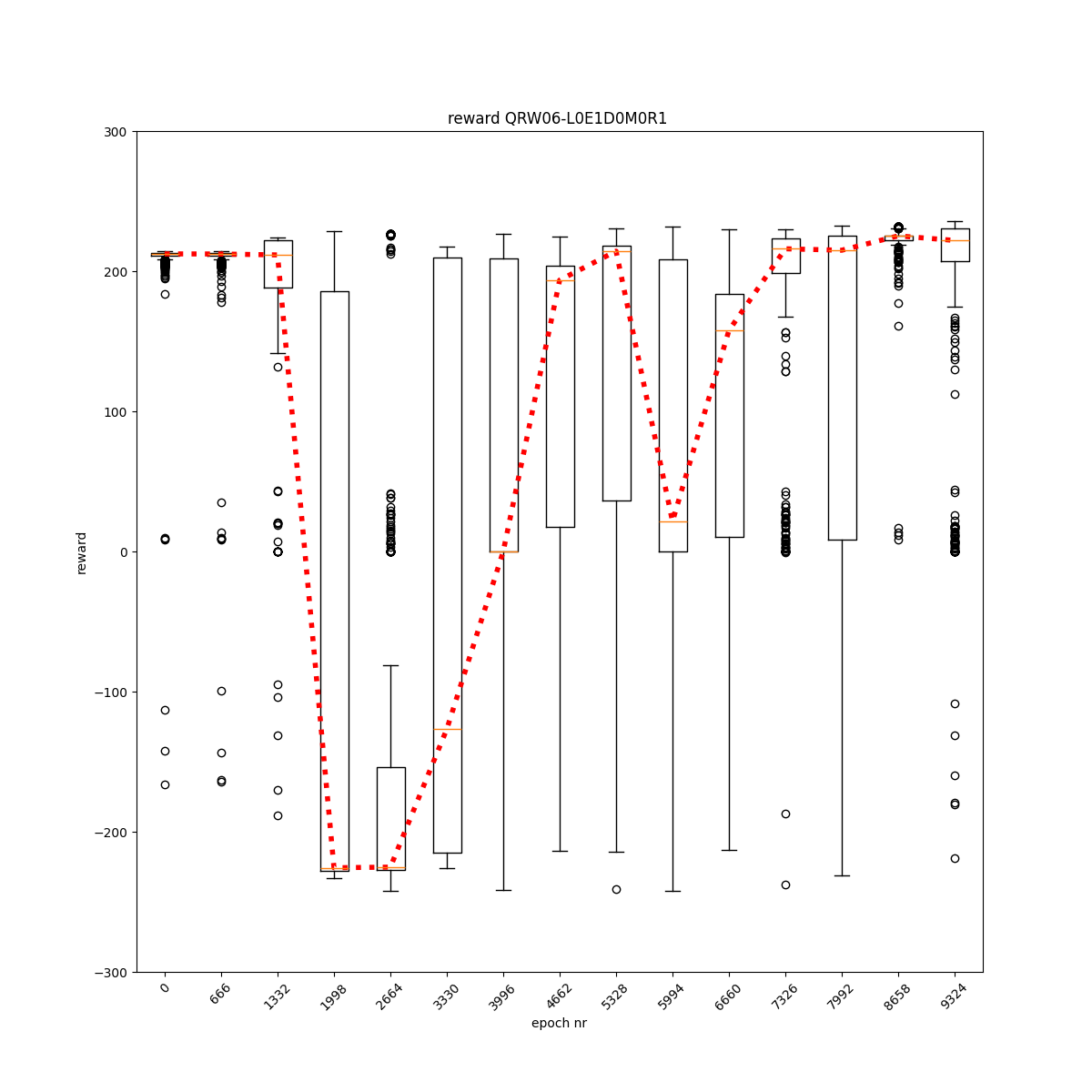
L0 E1 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
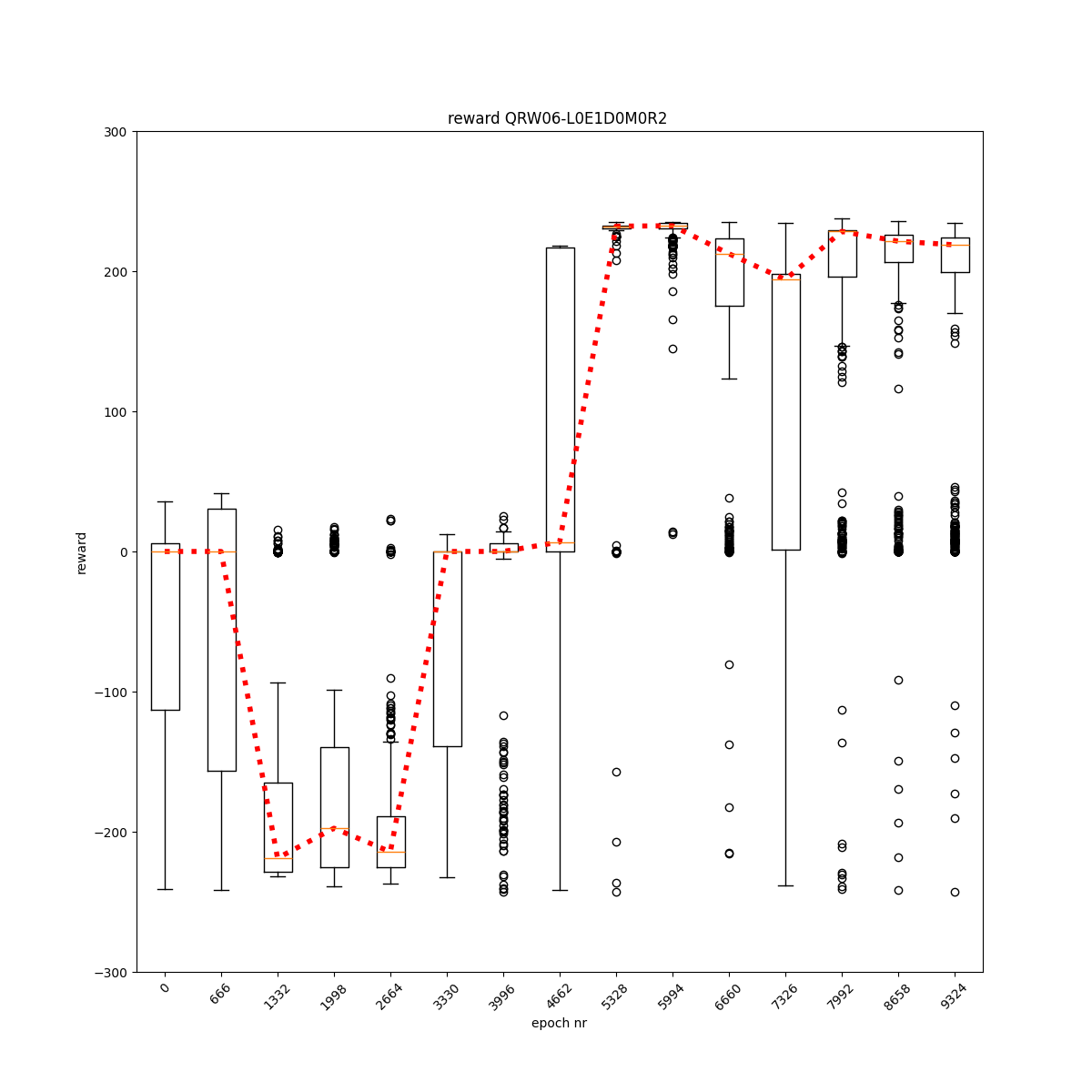
L0 E1 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
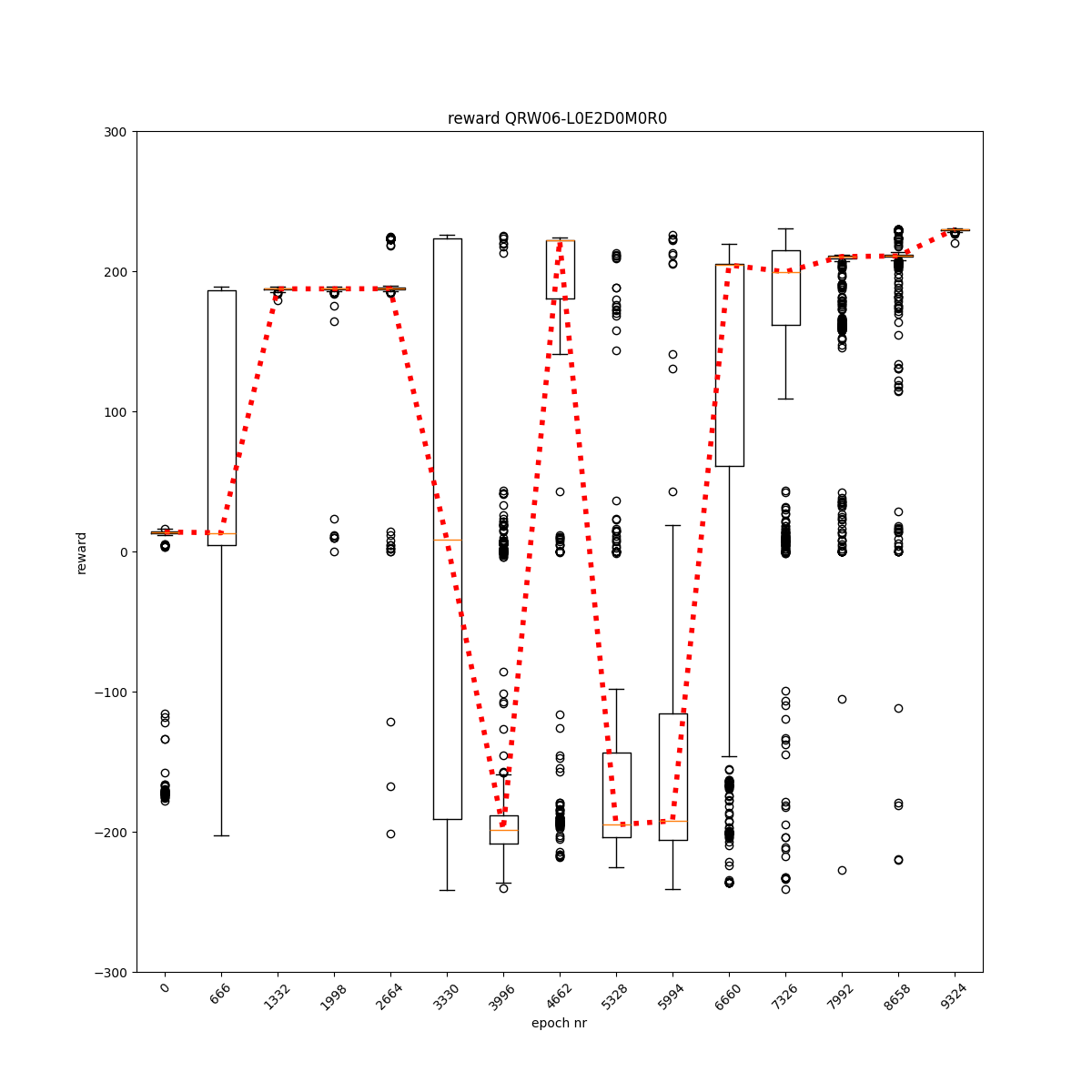
L0 E2 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
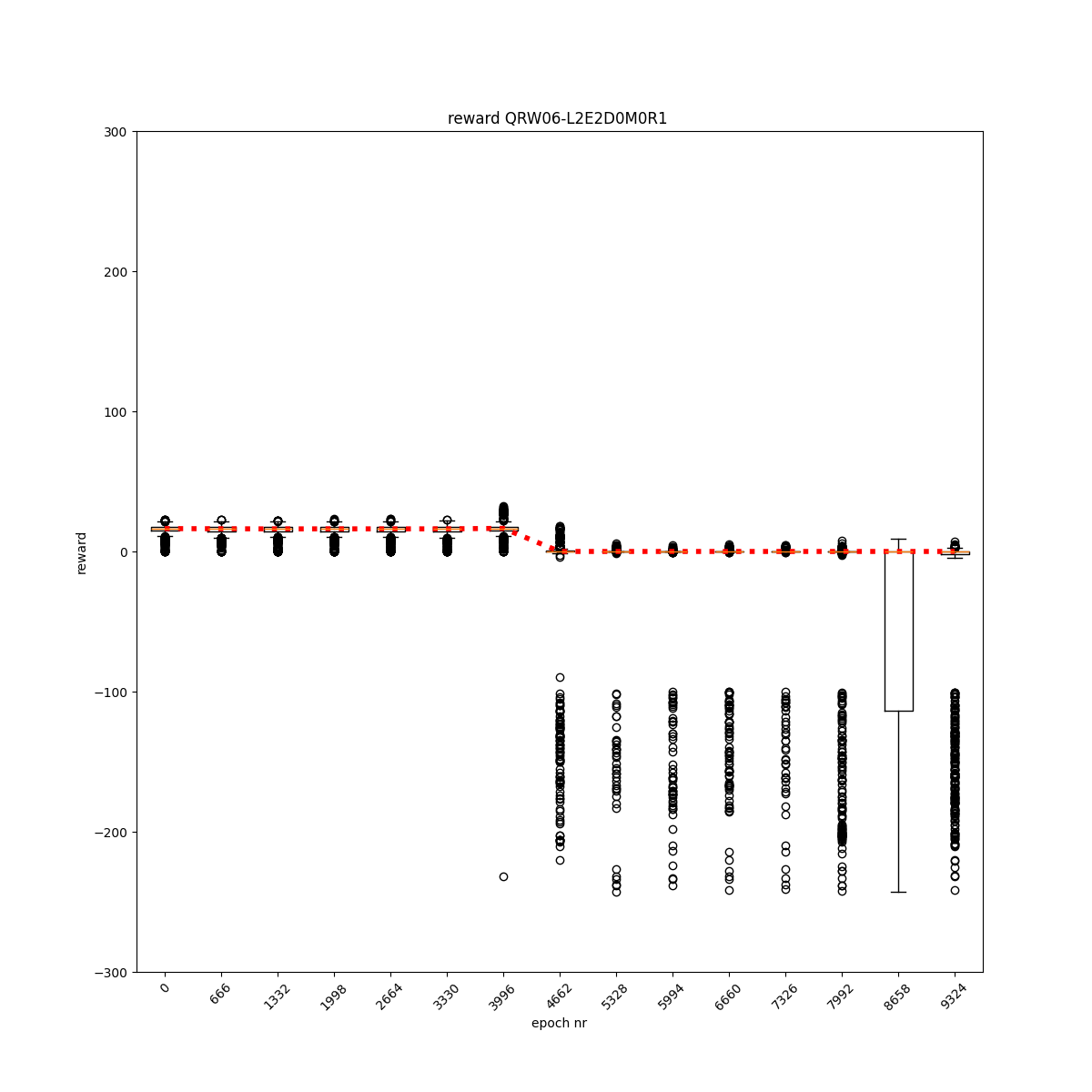
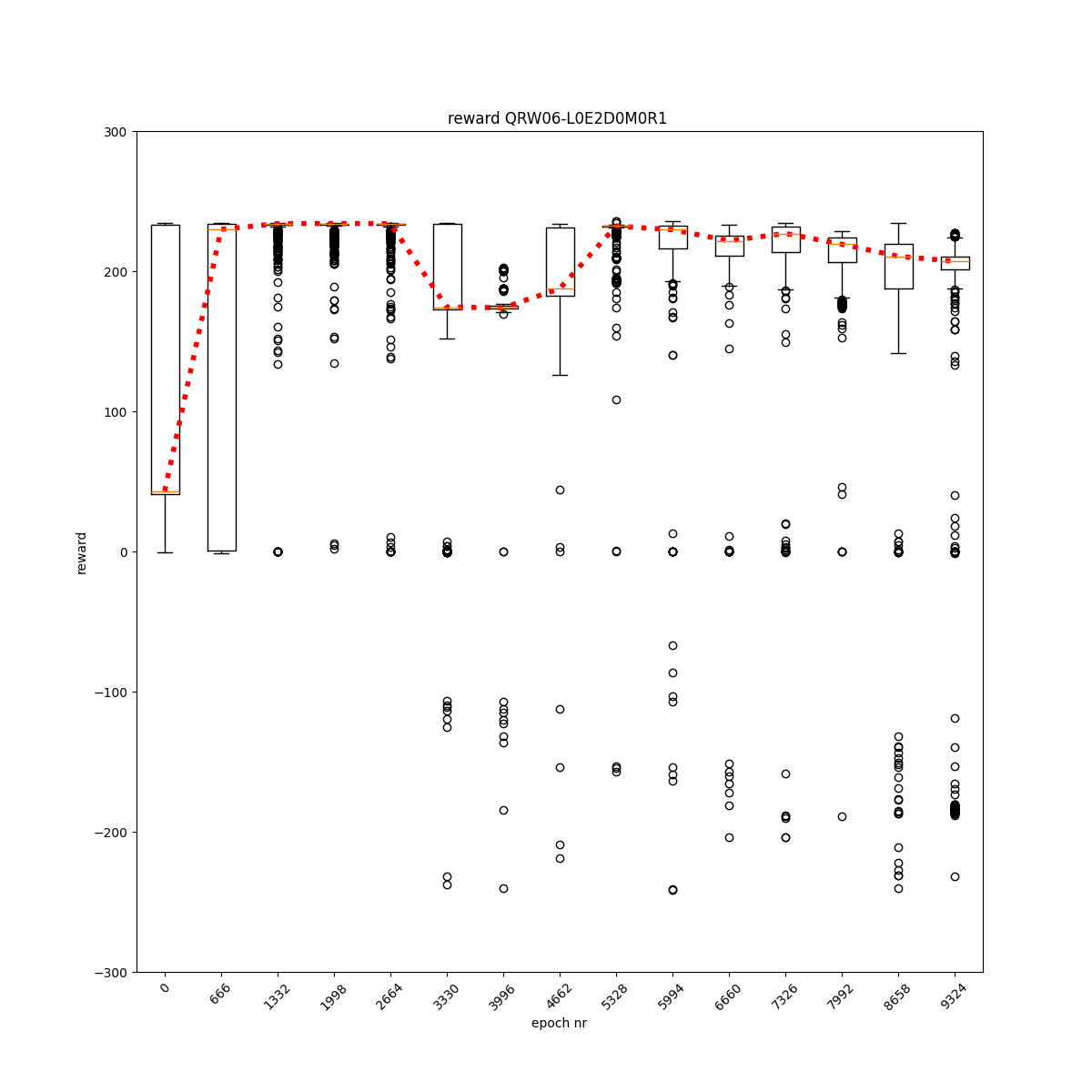
L0 E2 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
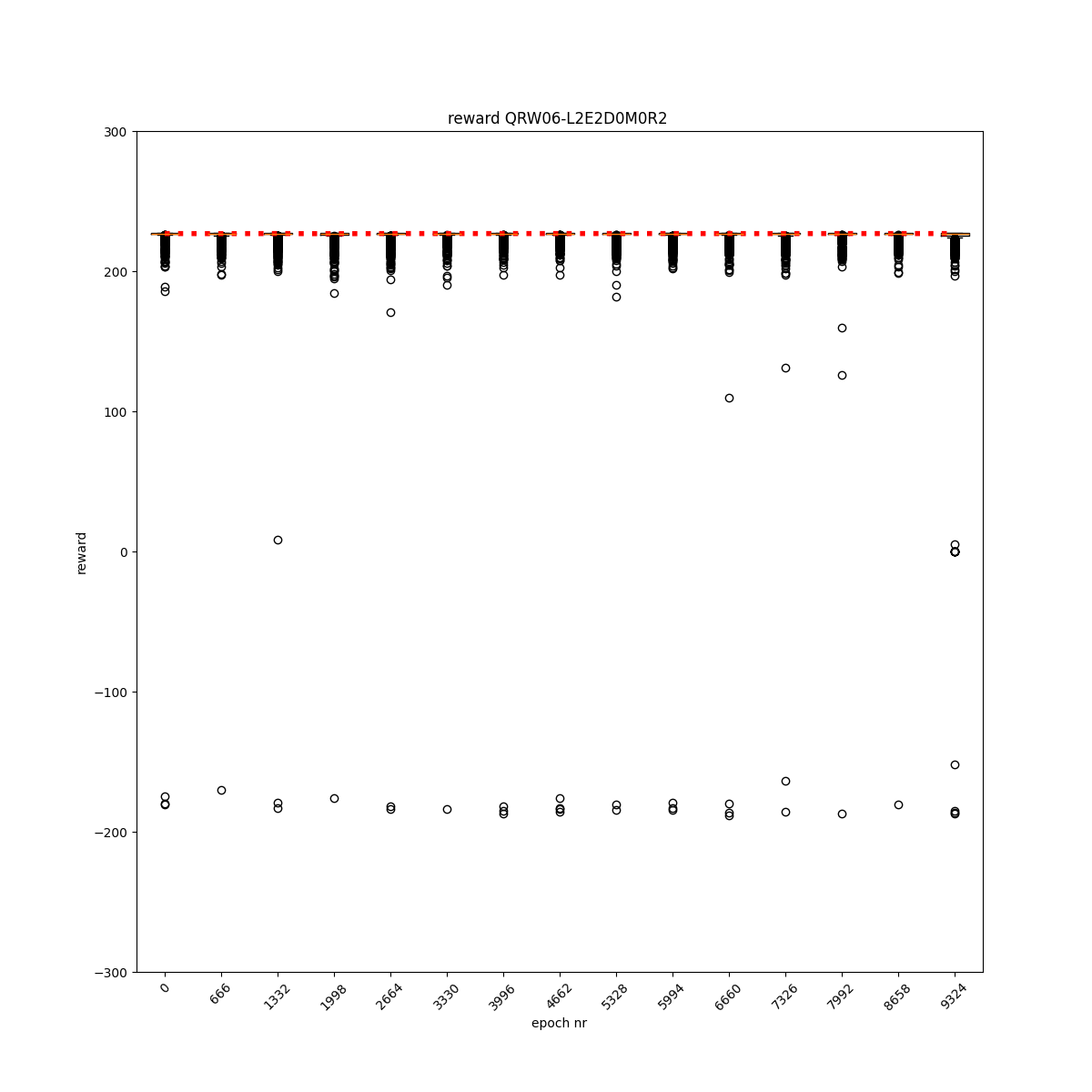
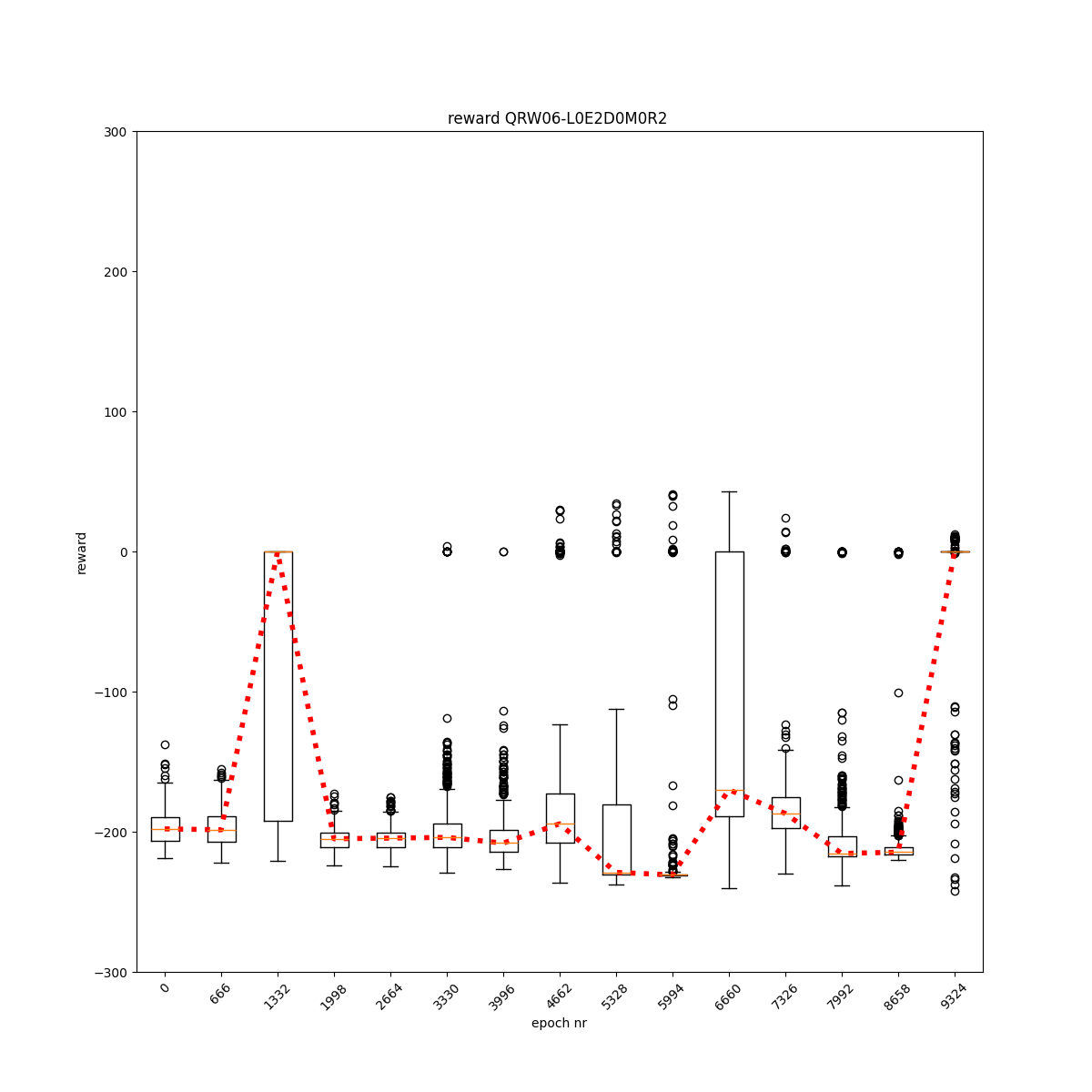
L0 E2 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
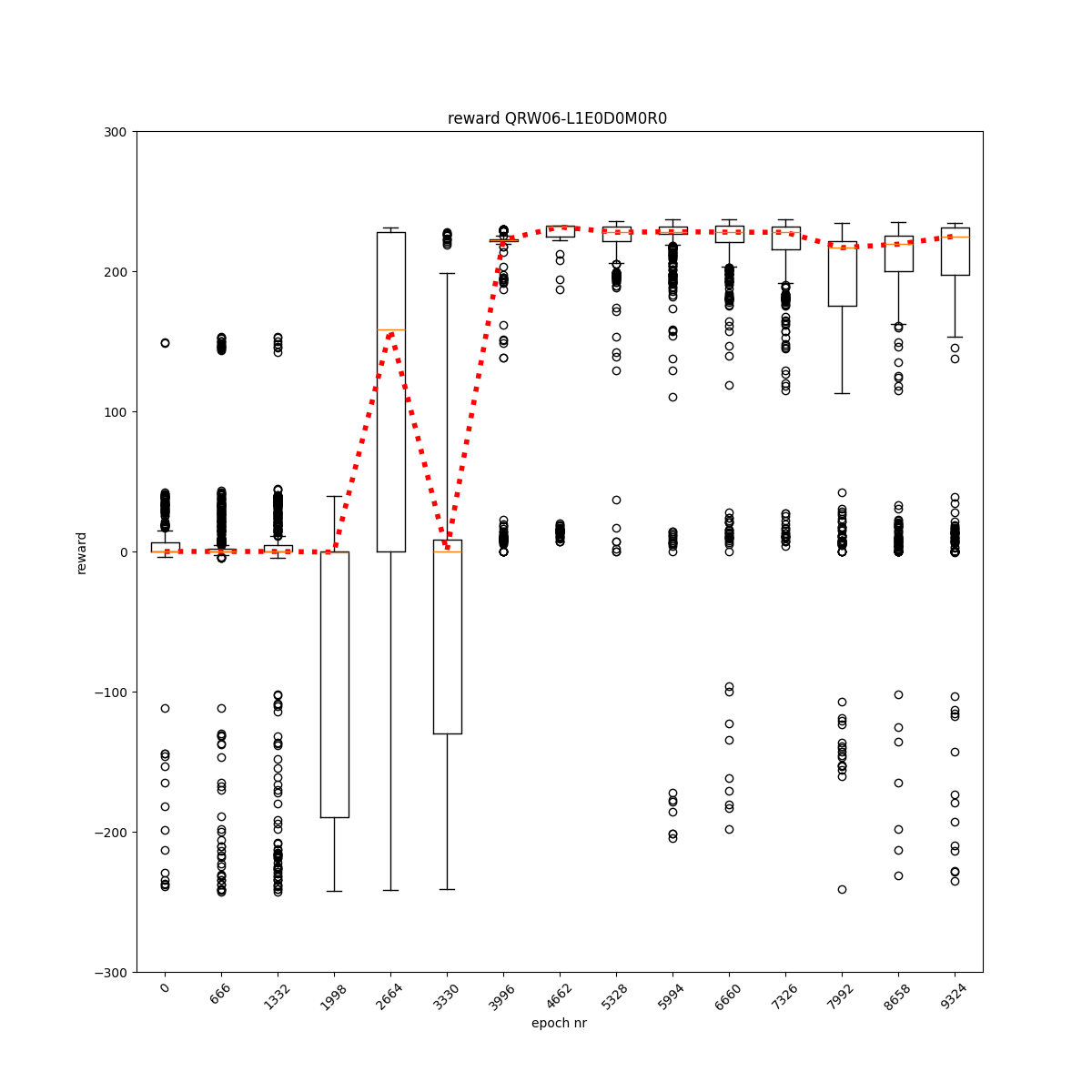
L1 E0 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
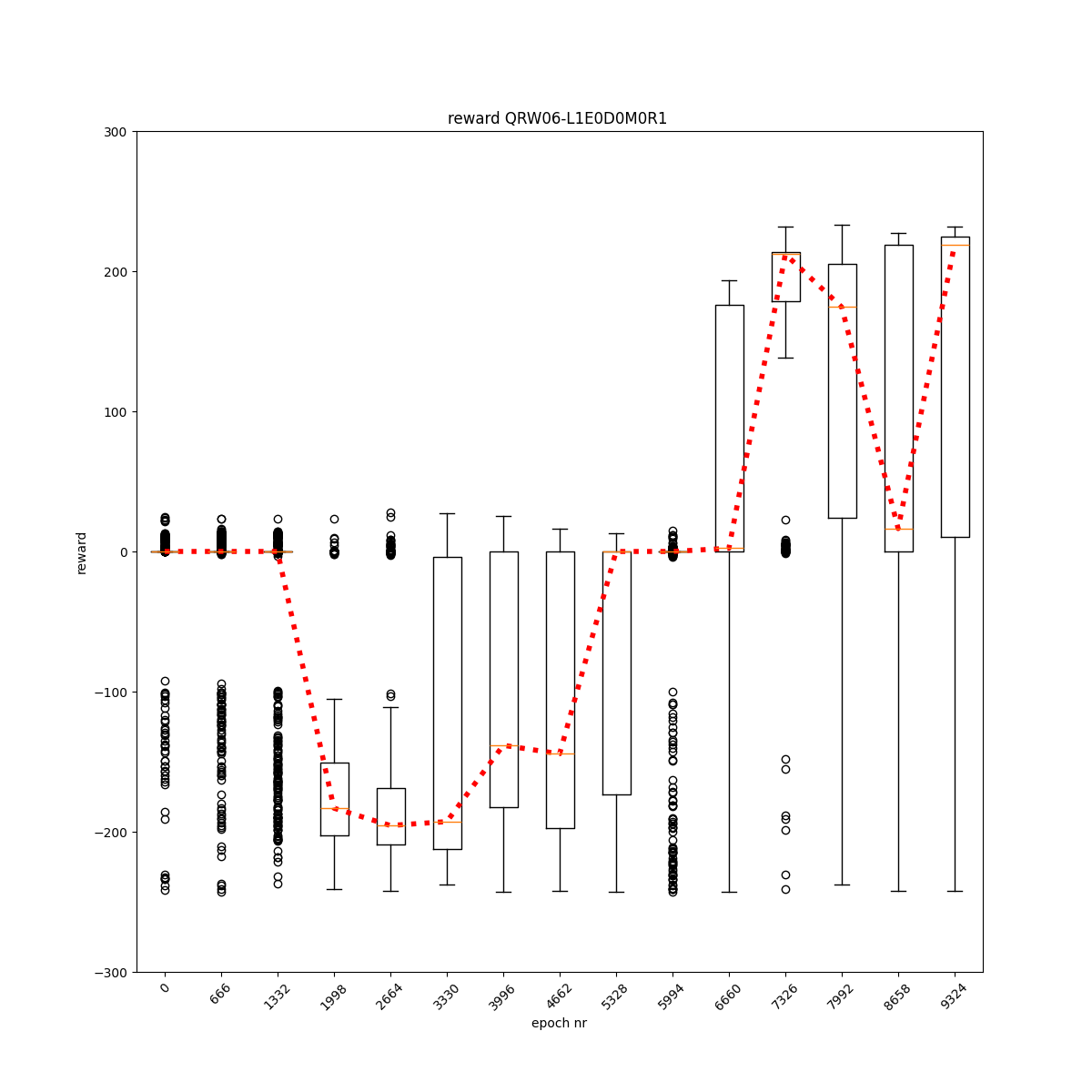
L1 E0 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
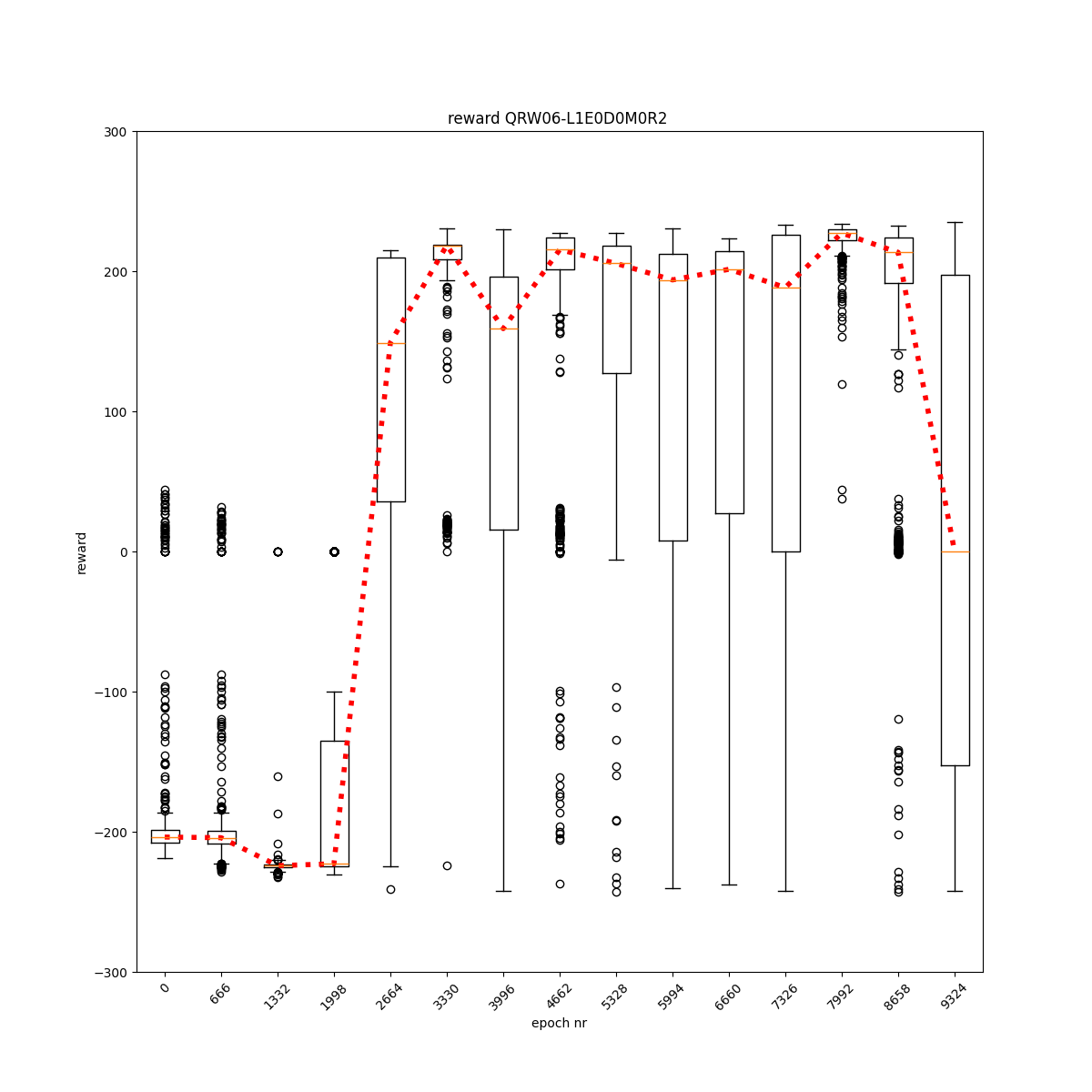
L1 E0 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
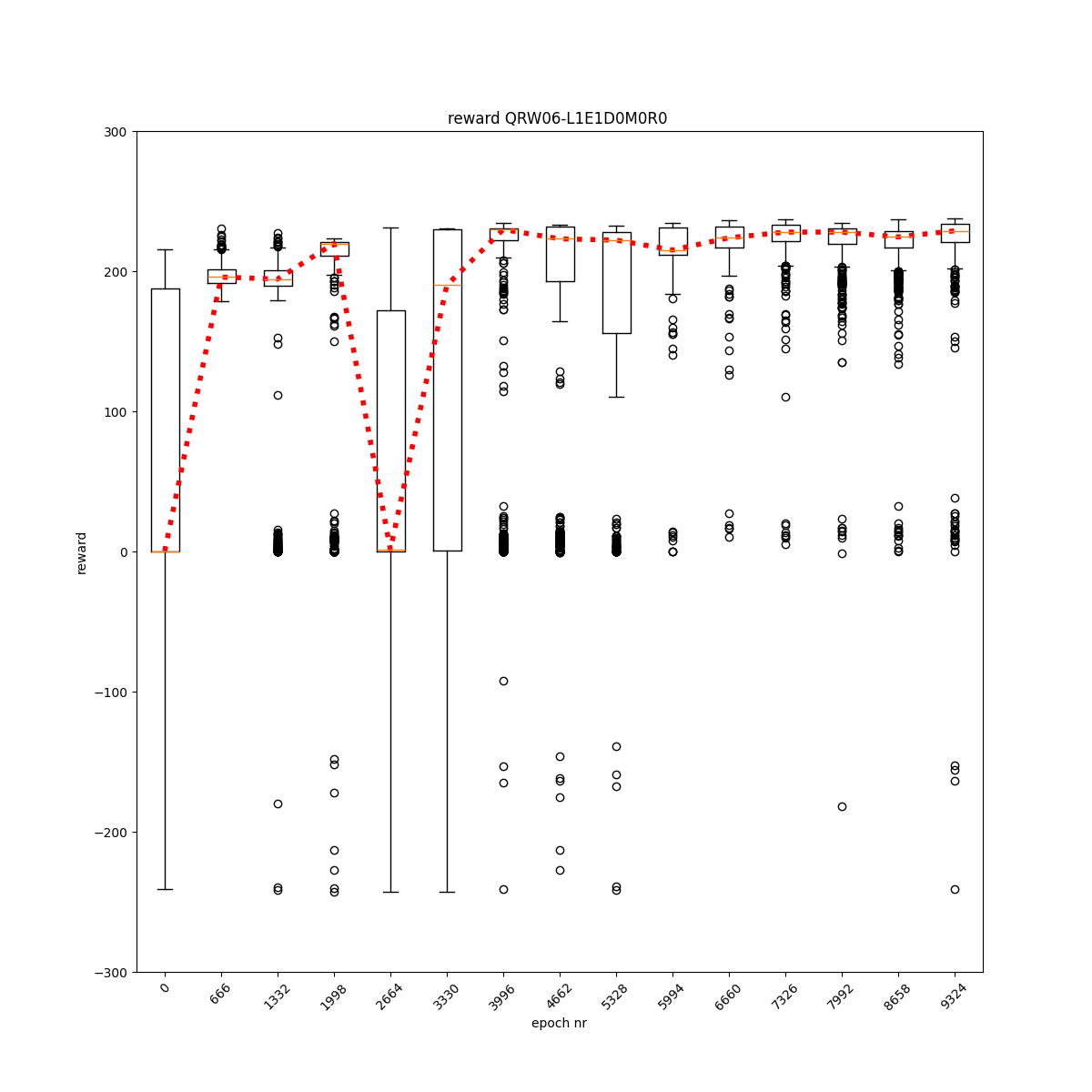
L1 E1 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
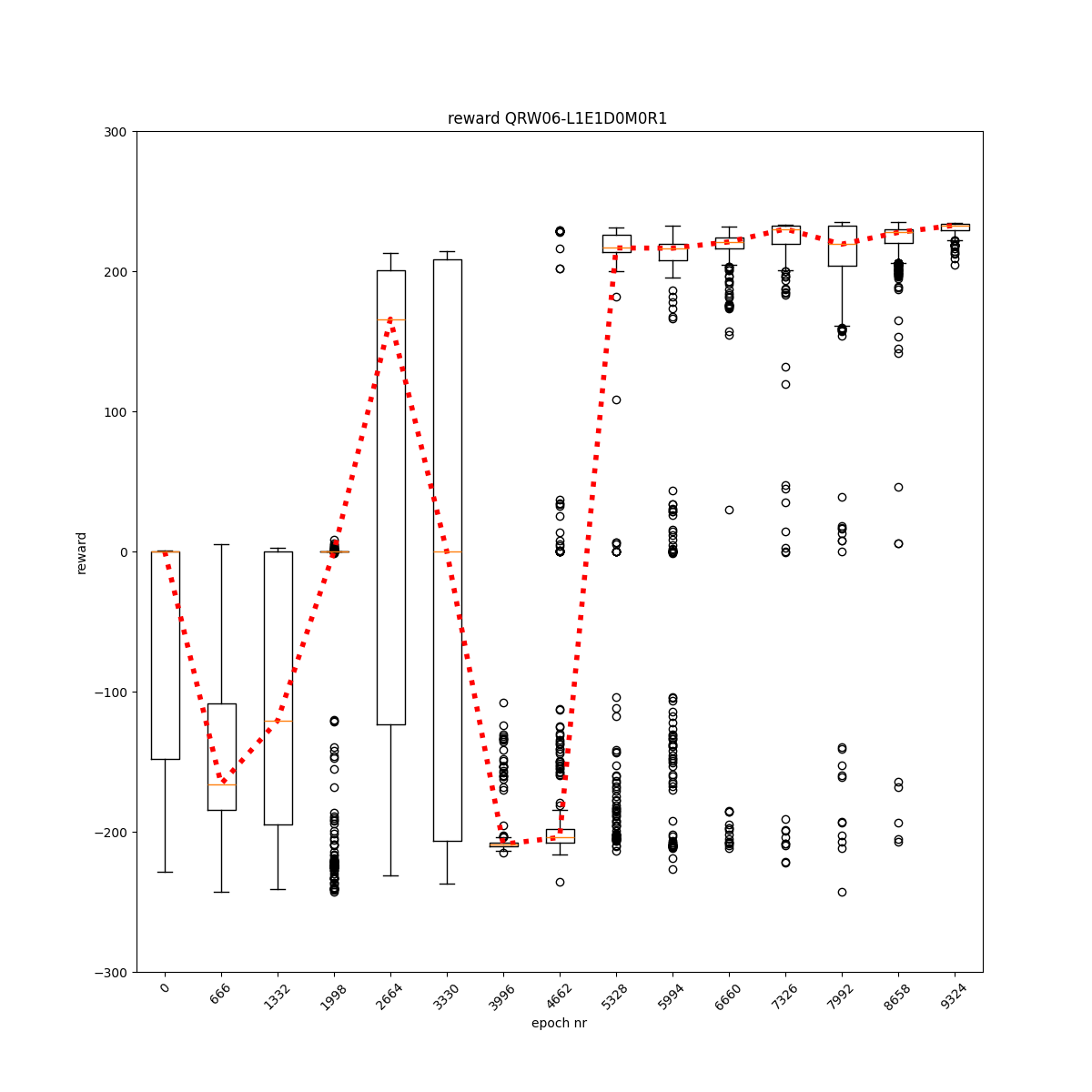
L1 E1 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
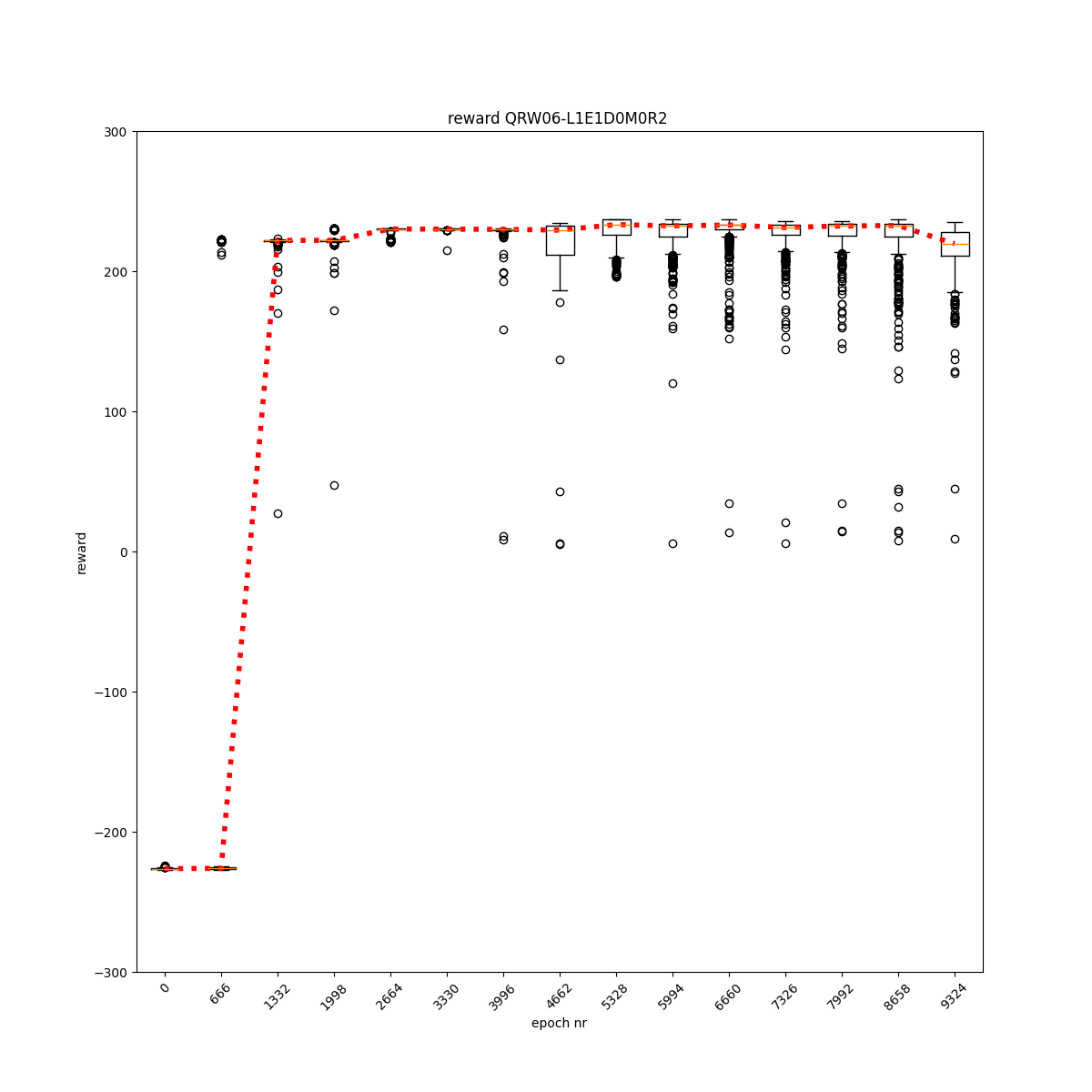
L1 E1 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
L1 E2 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
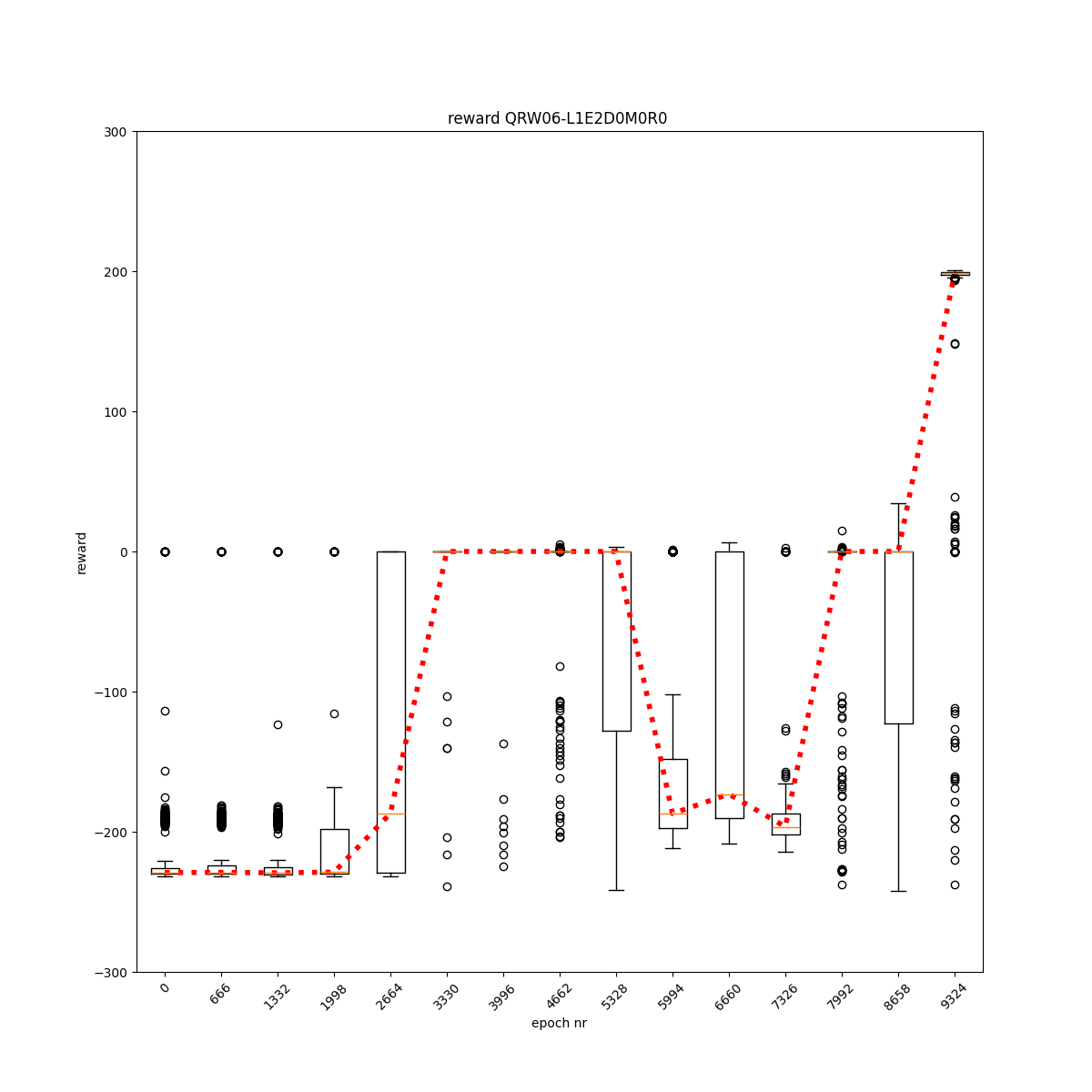
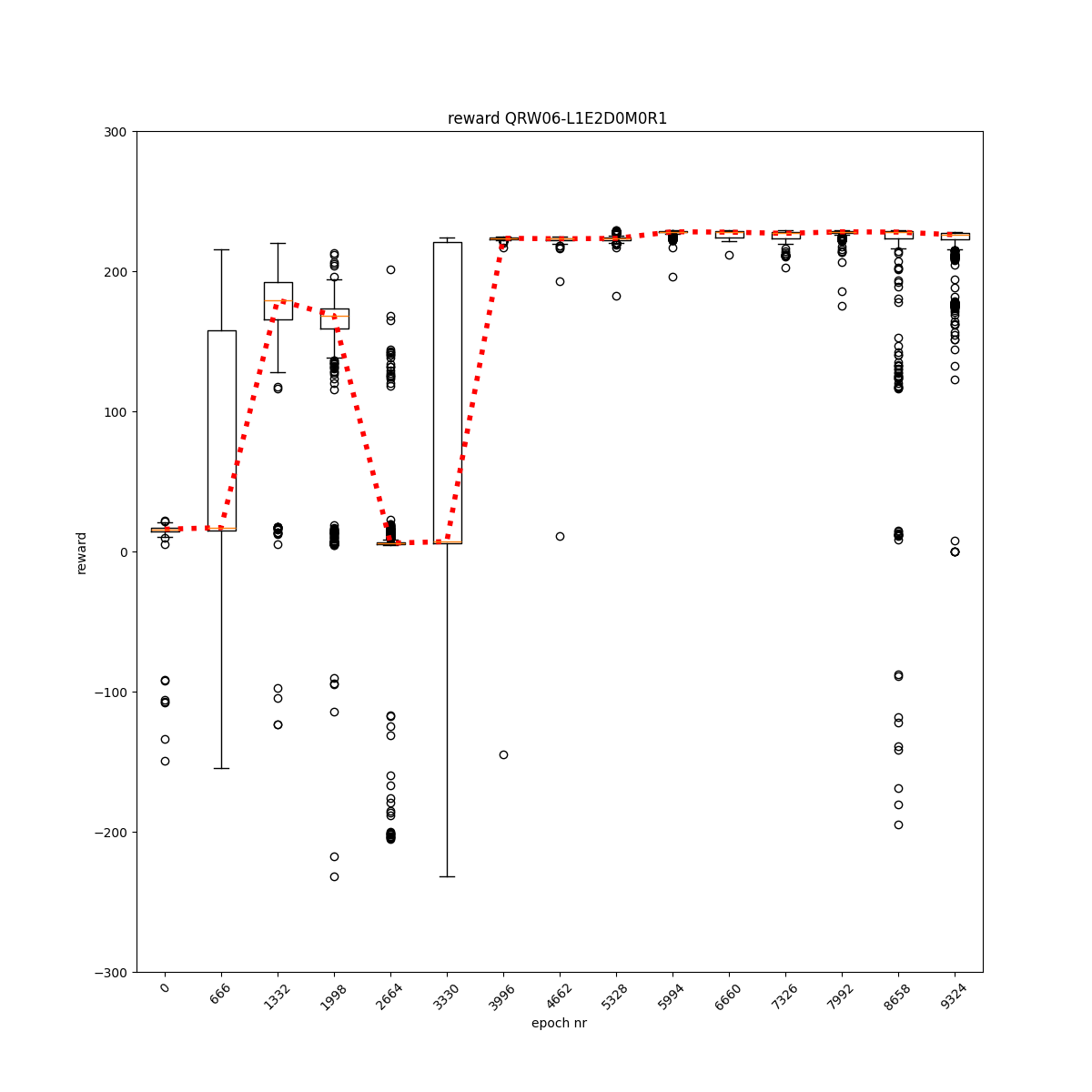
L1 E2 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
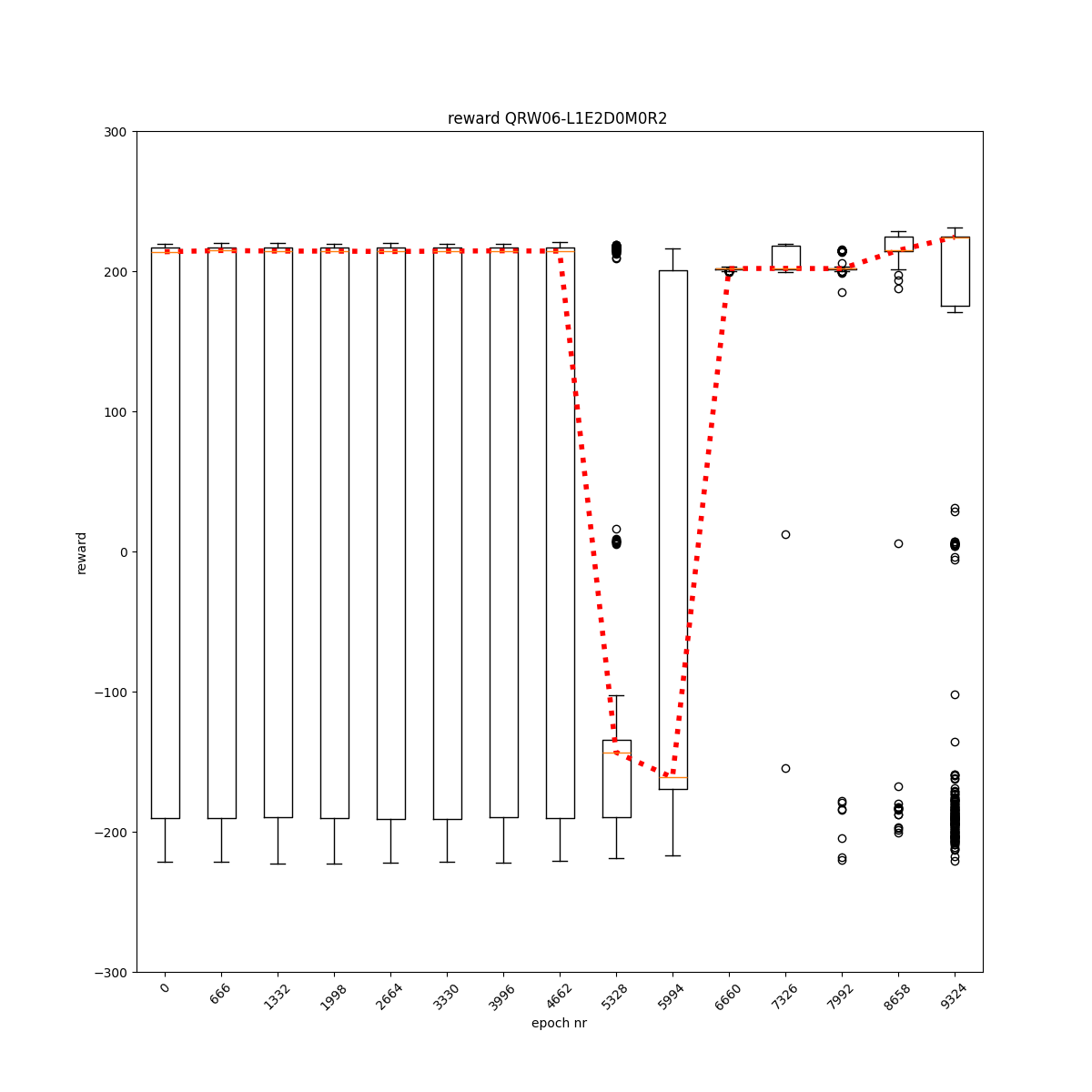
L1 E2 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
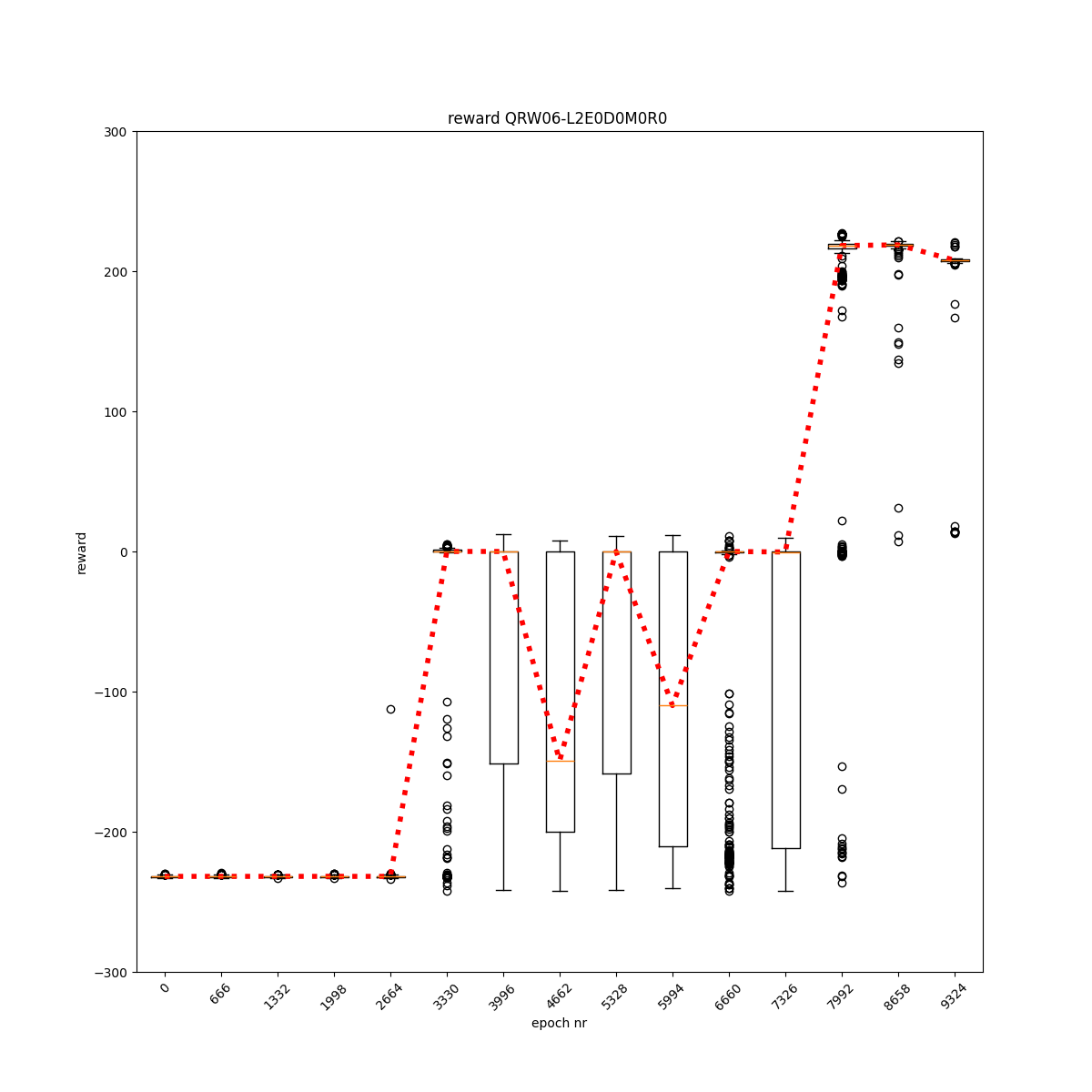
L2 E0 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
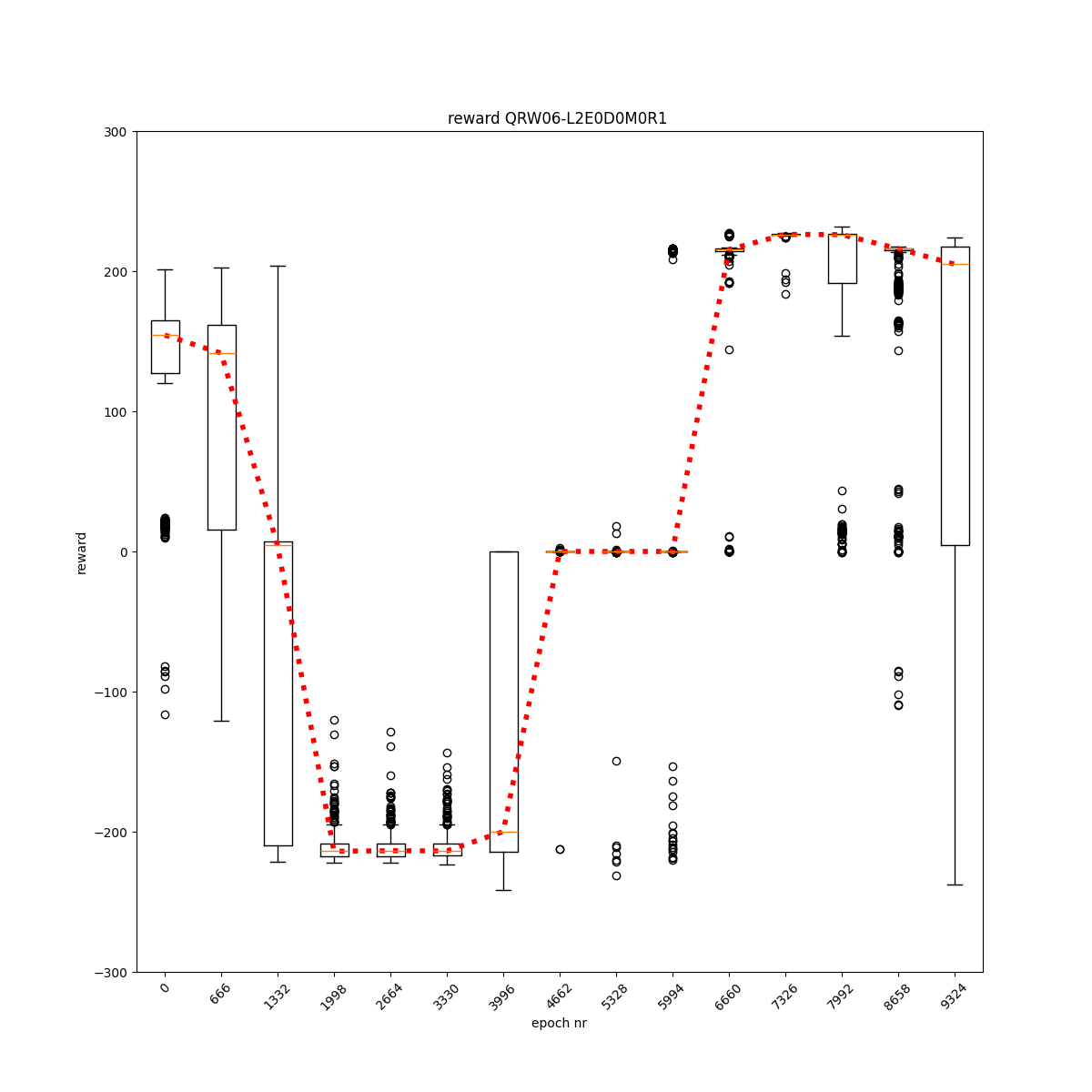
L2 E0 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
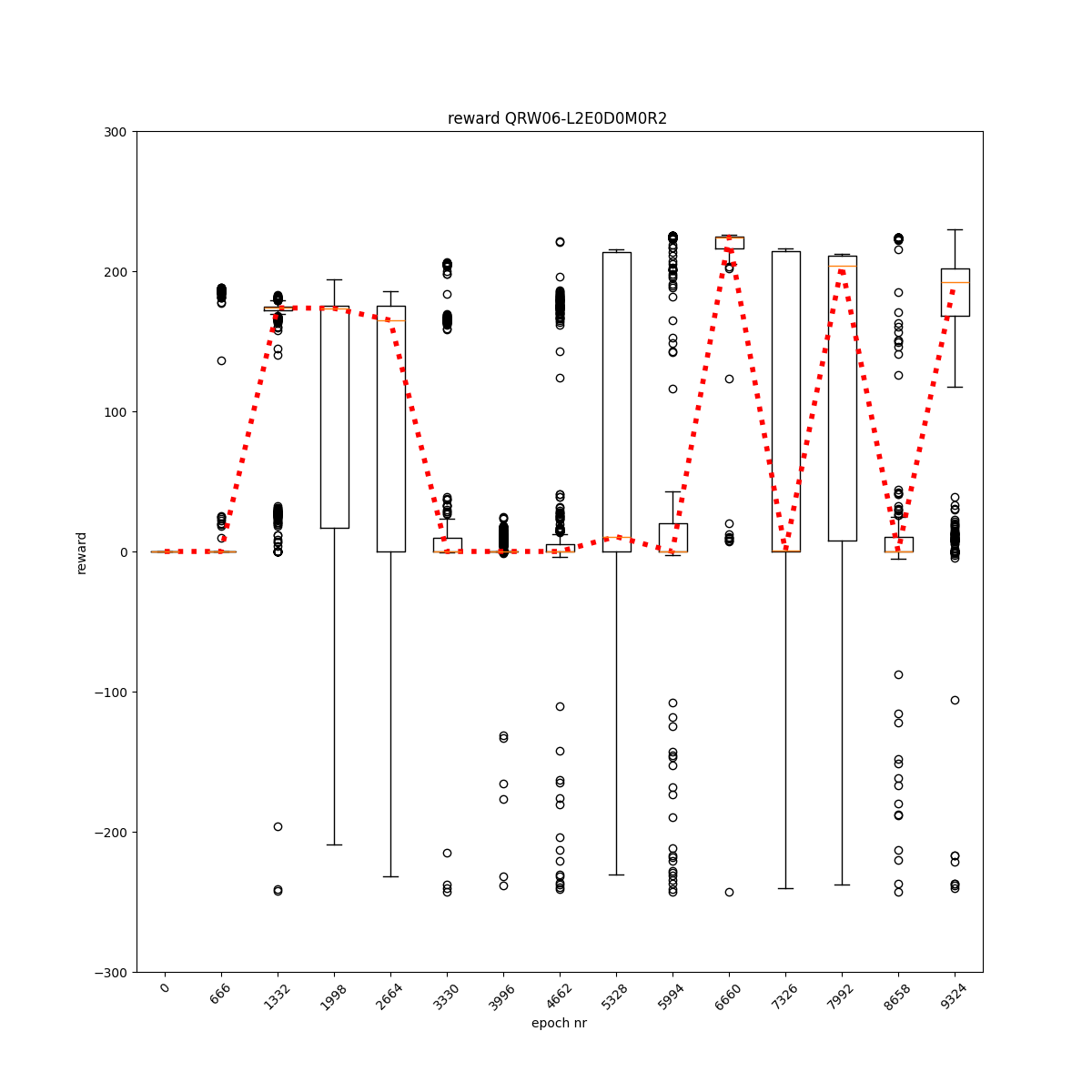
L2 E0 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
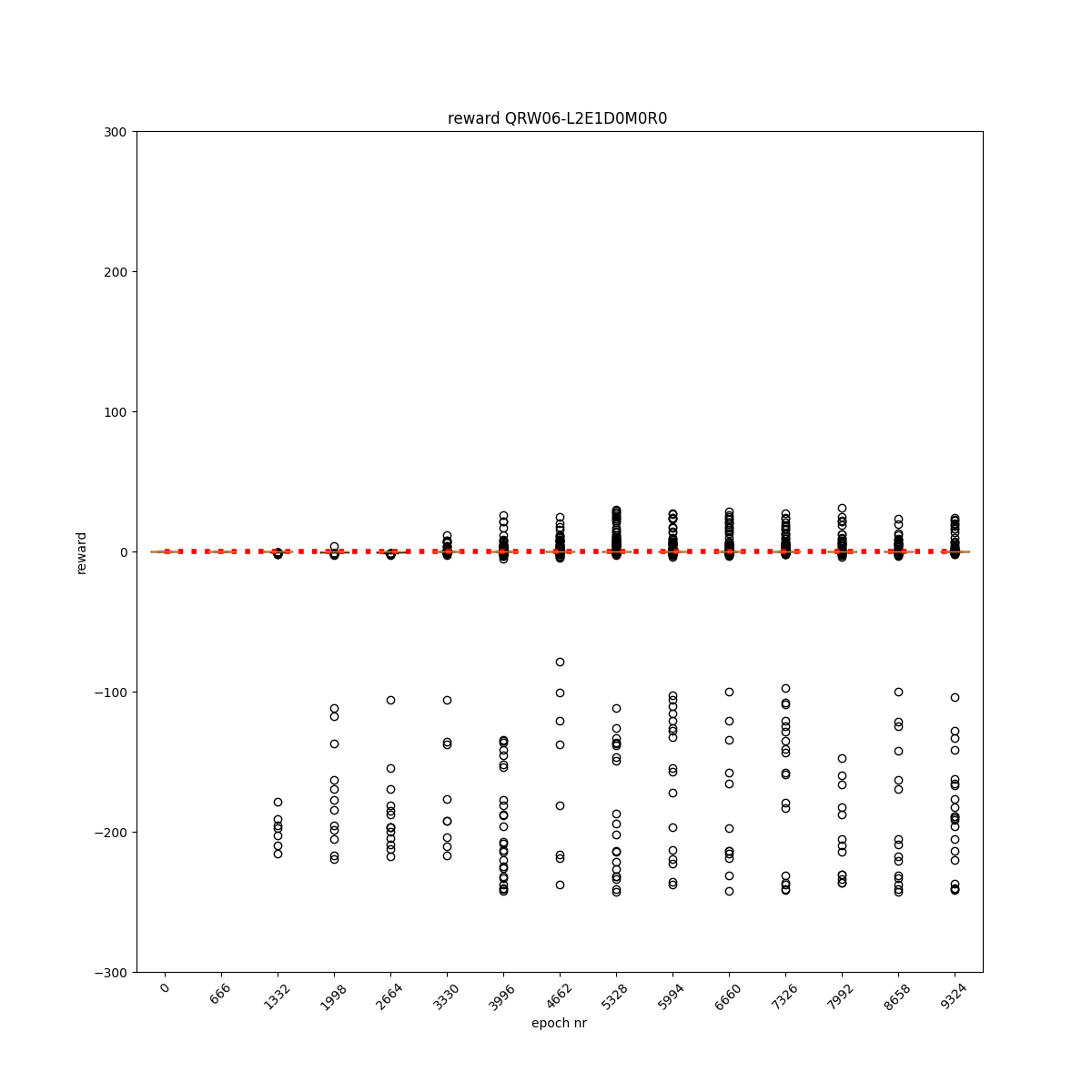
L2 E1 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
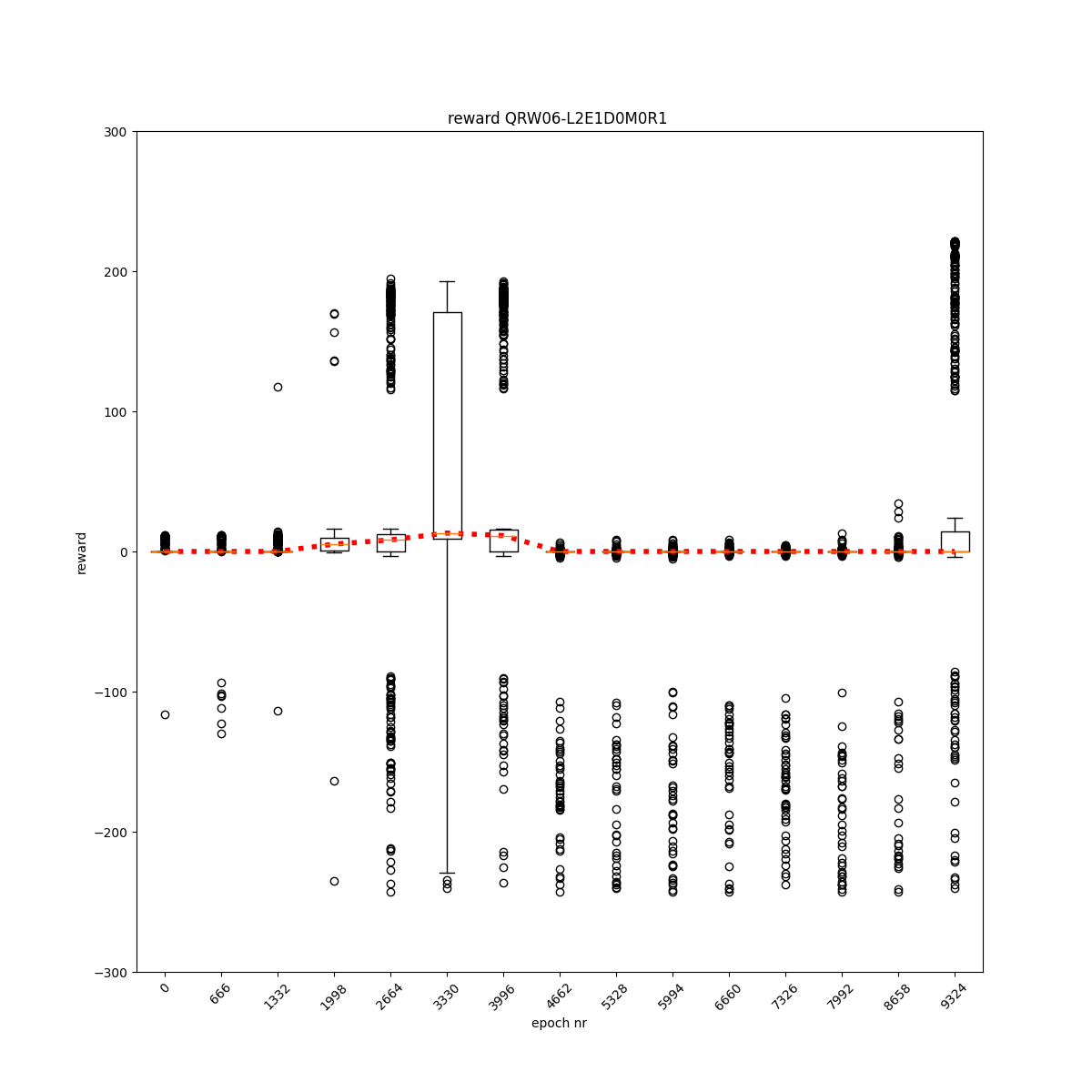
L2 E1 D0 M0 R1
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
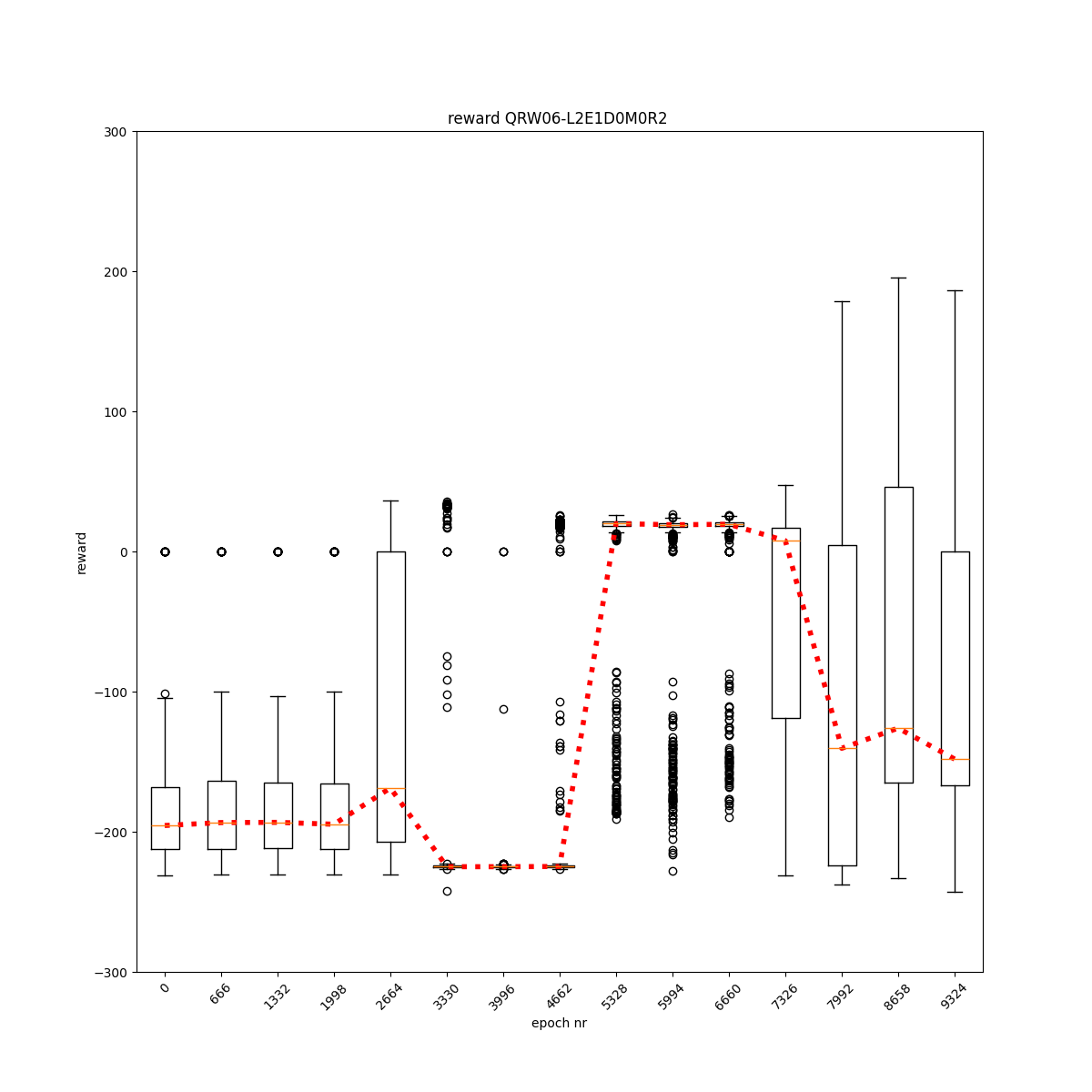
L2 E1 D0 M0 R2
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
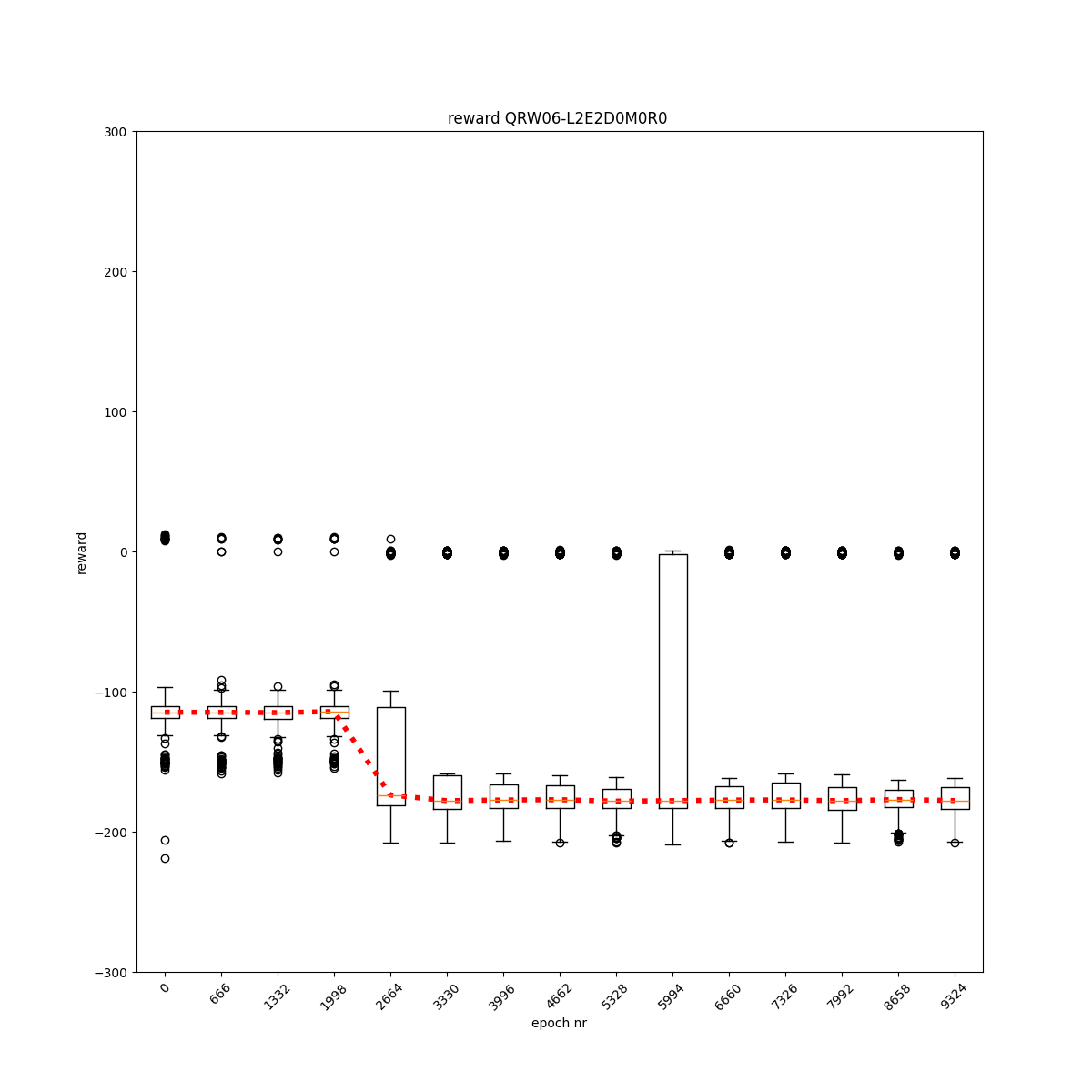
L2 E2 D0 M0 R0
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11
q-values
video 0 video 1 video 2 video 3
video 4 video 5 video 6 video 7
video 8 video 9 video 10 video 11